本网讯(通讯员 朱丽娜)近日,电气信息学院教师刘皓研究成果被自动控制领域国际Top期刊《IEEE Transactions on Automatic Control》录用。该期刊是IEEE控制系统学会的旗舰汇刊,创刊于1956年,致力于发表系统与控制领域的基础理论、设计与应用方面的高水平论文,被公认为国际控制与自动化领域的顶级期刊之一,同时也是中科院Top期刊,是衡量各高校系统与控制领域学术水准的标志性期刊。
传统的状态估计通常假设数据中心是可信的,所有传感器数据以明文形式汇总。但在网络攻击日益频繁、数据隐私法规(如GDPR)日趋严格的今天,这个假设不再成立。此外,现代关键基础设施(如电网)是国家级的网络战目标,而传统的安全防护(防火墙、入侵检测)是“外围防御”,一旦被突破,内部明文数据将暴露无遗,使得国家安全受到严重威胁。因此,如何解决信息物理系统状态估计的安全问题备受学术界的关注。
本研究工作将“数据机密性”提升到与状态估计同等重要的设计起点,将隐私保护作为状态估计的“第一原则”而非事后补偿,实现了数据安全与隐私的协同设计。本工作针对含有未知但有界噪声的信息物理系统,提出了加密集员估计理论框架,该理论框架允许通过公共网络将隐私敏感数据的状态估计外包至第三方平台。为了防止关键信息被窃取泄密,采用Paillier加密方案对数据进行安全加密,并分析量化误差产生的影响。在假设两个云平台不存在共谋的前提下,设计了基于(2,2)-门限秘密共享加密方案以降低计算负担、提高计算效率,并进一步证明了其安全性。通过仿真验证,该加密方案能够实现10-6秒级的计算速度,远低于同态加密的运行时间(10-3秒级)。
本研究将密码学引入状态估计,本质上是在不暴露原始数据的前提下,依然能够计算出准确的状态。该问题的解决实现了“数据可用不可见”,其核心价值是解决隐私与功能的根本矛盾,提升了系统的抗攻击能力,将安全防护的边界从“系统边界”推进到了“数据本身”,使得在不可信的环境下(如云平台、敌对网络)建立可信的监控系统成为可能。本研究成果可广泛应用于智能交通与车联网、智能电网与能源互联网、工业物联网与智能制造等的关键领域。
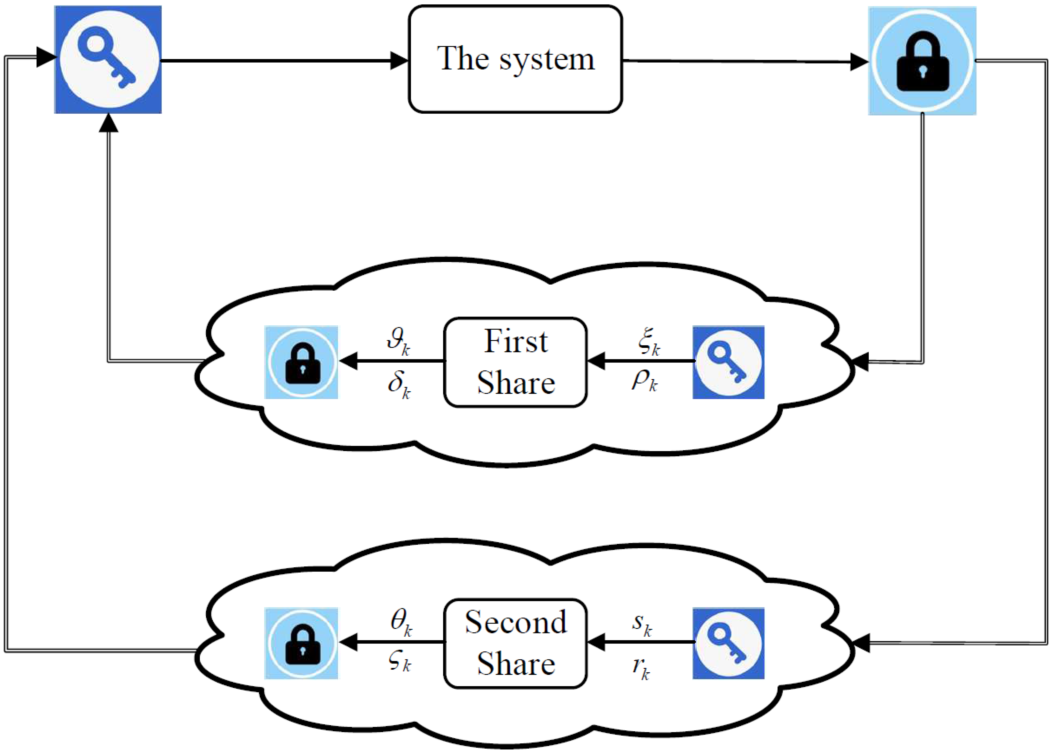
基于(2,2)-门限秘密共享的加密集员估计结构
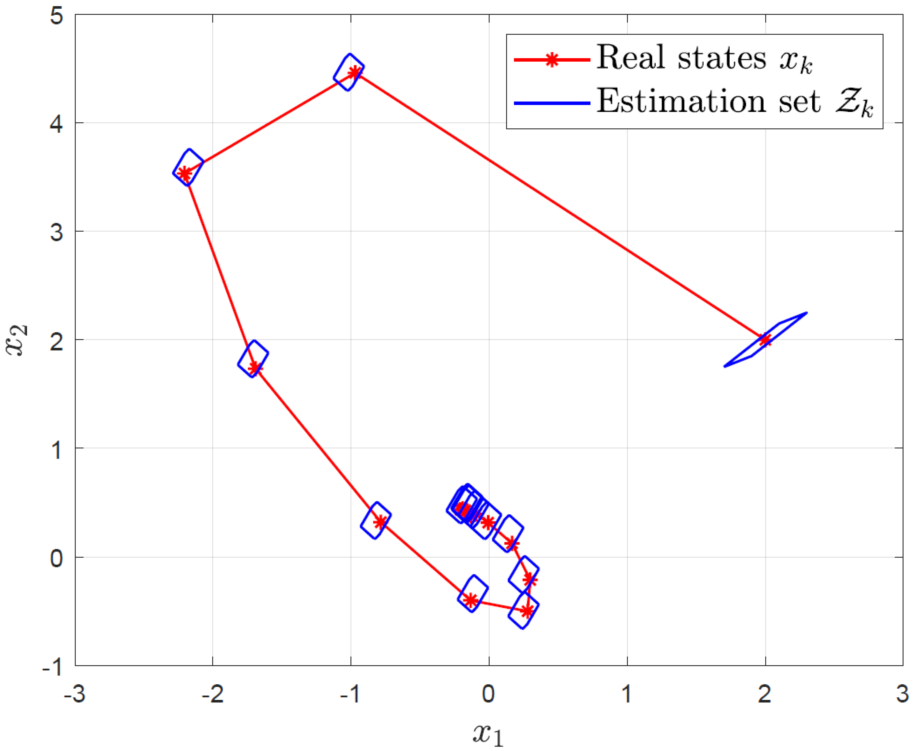
考虑量化和固定点算法的估计结果
(审稿:谢春晖 田斌)
 官网首页
官网首页